
Overview
The CyberGrasp system is an innovative force feedback system for your fingers and hand. It lets you "reach into your computer" and grasp computer-generated or tele-manipulated objects.
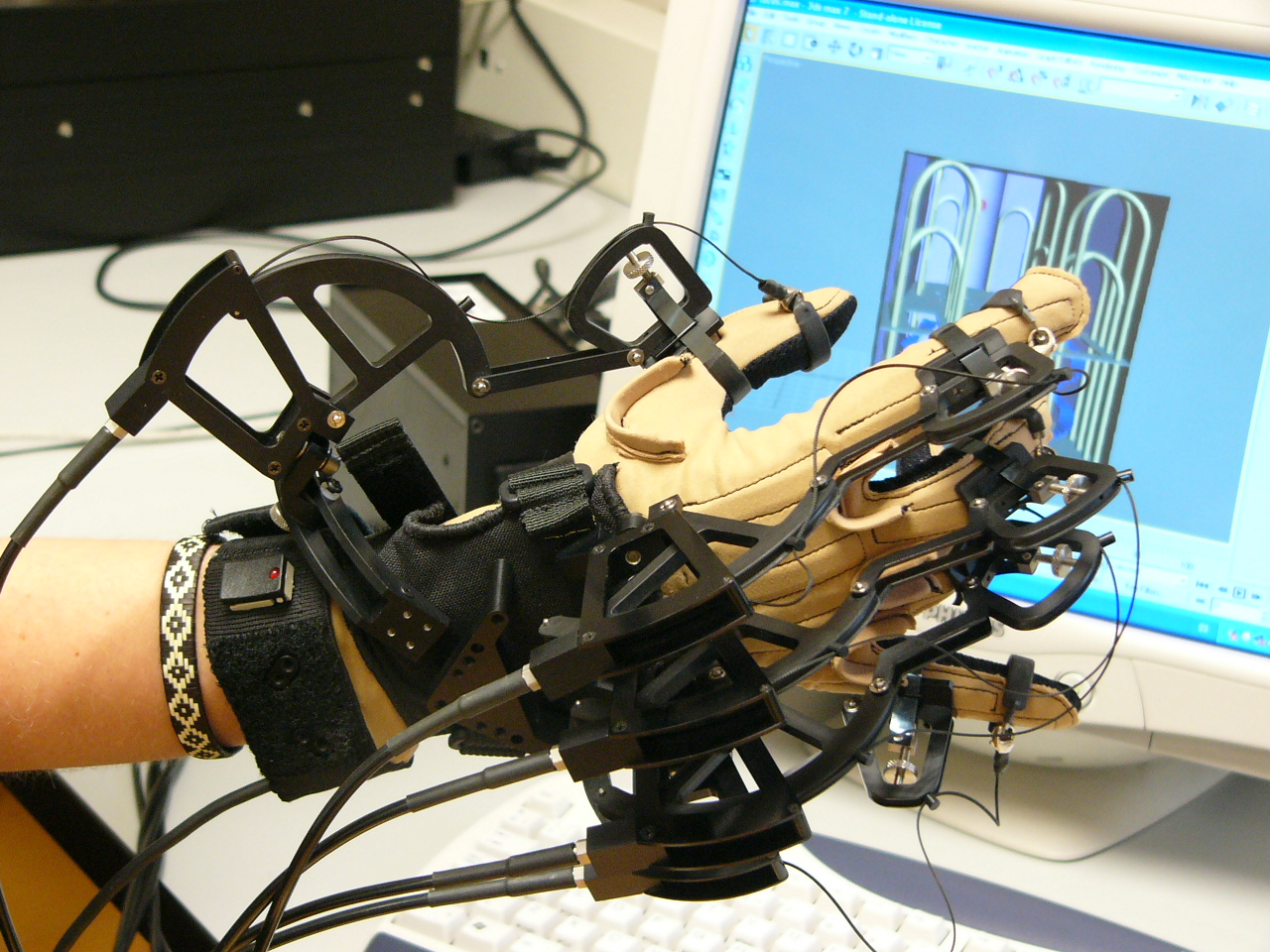
The CyberGrasp device is a lightweight, force-reflecting exoskeleton that fits over a CyberGlove data glove (wired version) and adds resistive force feedback to each finger. With the CyberGrasp force feedback system, users are able to feel the size and shape of computer-generated 3D objects in a simulated virtual world.
Grasp forces are produced by a network of tendons routed to the fingertips via the exoskeleton. There are five actuators, one for each finger, which can be individually programmed to prevent the user's fingers from penetrating or crushing a virtual solid object. The high-bandwidth actuators are located in a small actuator module, which can be placed on the desktop. Additionally, since the CyberGrasp system does not provide grounded forces, the actuator module can also be worn in a GraspPack backpack for portable operation, dramatically increasing the effective workspace.
The device exerts grasp forces that are roughly perpendicular to the fingertips throughout the range of motion, and forces can be specified individually. The CyberGrasp system allows full range-of-motion of the hand and does not obstruct the wearer's movements. The device is fully adjustable and designed to fit a wide variety of hands.
Originally developed under STTR contract to the United States Navy for use in telerobotic applications, the CyberGrasp system allows an operator to control a remotely-located robotic "hand" and literally "feel" the object being manipulated.
Specifications
- Force: 12 N per finger (max, continuous)
- Weight: 16 oz (exoskeleton without CyberGlove system)
- Workspace: 1 meter spherical radius from the Actuator Module
- CyberGlove: A CyberGlove device is required for a CyberGrasp system (22-sensor CyberGlove device recommended)
- Instrumentation Unit: A Force Control Unit and Actuator Module are included
- Interface: Ethernet
- CyberForce robotic armature option recommended with the CyberGrasp system
PHOTO/VIDEO






Applications / Plugins
Please Contact Us for information on applications.




